Voltage Control on Non-Inverting Buck-Boost DC-DC Converter with the Digital PI Method
DOI:
https://doi.org/10.24036/jtein.v7i1.798Keywords:
non-inverting buck-boost, DC-DC converter, PI control, voltage stabilityAbstract
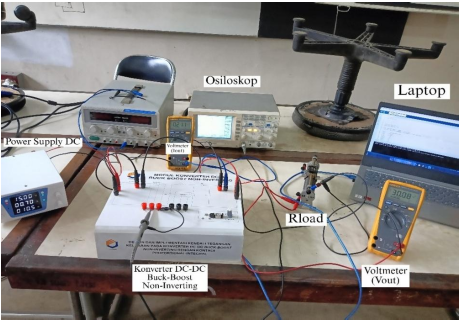
The need for a stable and efficient power supply system is crucial in various modern electronic applications to step up and step down DC voltages. One solution is a non-inverting buck-boost DC-DC converter that is capable of stepping up or stepping down the voltage without reversing the output polarity. However, the stability of the output voltage remains a challenge, especially when there is a change in load or reference value (setpoint). This study aims to design and implement a non-inverting buck-boost converter with a Proportional-Integral (PI) controller to maintain output voltage stability. The method used is PI control determined by Ziegler-Nichols Type I to find the proportional constant (Kp) and integral constant (Ki), which is then refined through a trial and error approach, digital PI control is implemented through a program on a microcontroller. The design is tested through simulations using PSIM software and hardware realization based on an Arduino Uno microcontroller with digital-based PI control using a program. The test results show that the system is able to maintain an output voltage of 30V from a 15V input with a settling time of 0.1 seconds in simulation and approximately 0.5 seconds in experimental testing. Despite a maximum overshoot of 22.93%, the system is still able to respond quickly to changes and maintain stability against load variations. These results indicate that PI control is effective in improving the output voltage stability of the non-inverting buck-boost converter, although refinement of the control parameters is still needed to improve the system's precision.
Downloads
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 JTEIN: Jurnal Teknik Elektro Indonesia

This work is licensed under a Creative Commons Attribution 4.0 International License.